

SR565Yθ‐ZZ


主な用途
・設置スペースを狭くしたい場合のねじ締めに(直交座標型比)
・製品の材質やねじ込み過程においてねじ締め推力を可変したい場合
・製品への衝撃をなくしたい場合
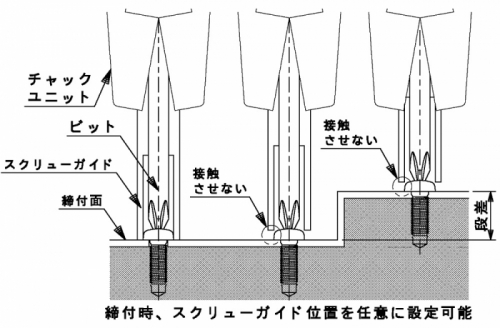
・締付位置周辺に干渉物がある場合
・袋穴やポイントごとに段差(締付高さが一定でない)がある場合
・製品の材質やねじ込み過程においてねじ締め推力を可変したい場合
・製品への衝撃をなくしたい場合
・締付位置周辺に干渉物がある場合
・袋穴やポイントごとに段差(締付高さが一定でない)がある場合
概略図

関連商品
ねじ締めロボット【ねじロボ<R>】
SR580Yθ‐ZZ

各種製品、採用、一般・その他に関するご相談、ご依頼は、
こちらよりお問い合わせください。
