全75件のうち、61-70件目を表示しています。
位置補正カメラ搭載ねじ締めロボット
位置補正カメラ搭載で締付対象ワークの位置ズレを補正し、最適なねじ締めを行うことが可能なYθ型ねじ締めロボットです。
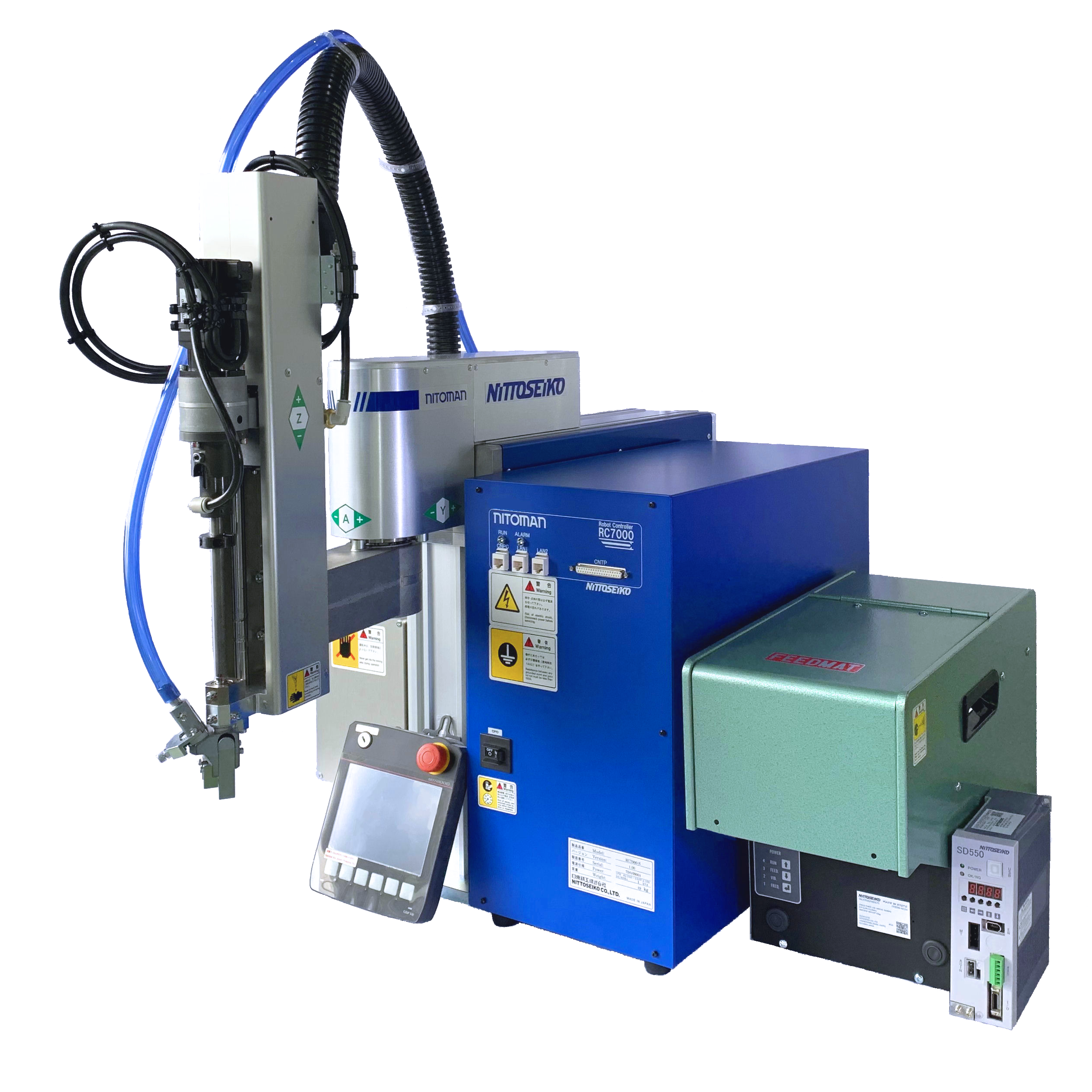
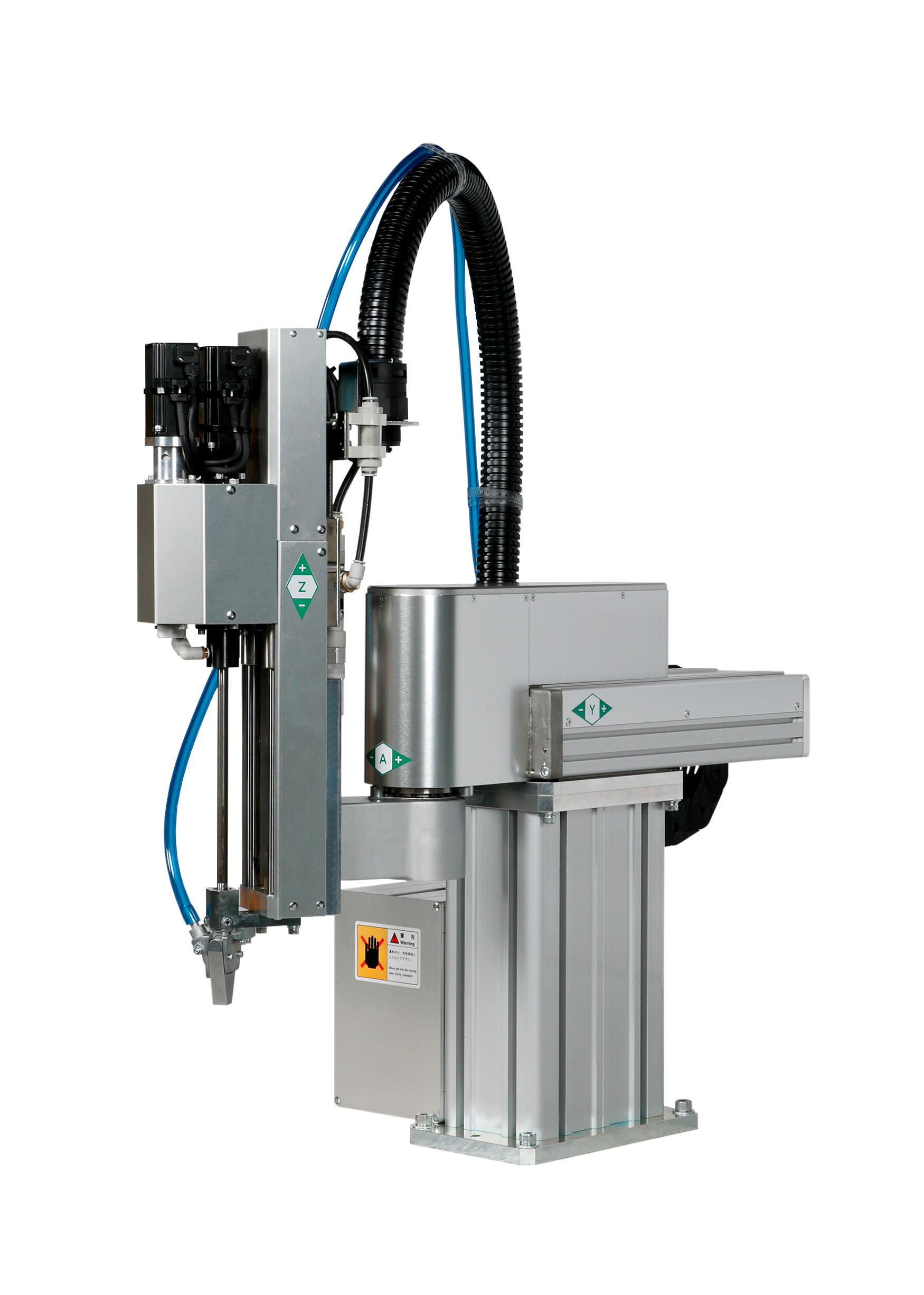
推力可変機能付きYθ型ねじ締めロボット(スタンダード)
推力可変機能付き当社スタンダードのYθ型ねじ締めロボットです。
推力可変機能付きYθ型ねじ締めロボット(スクリューガイド停止位置可変)
推力制御にスクリューガイド停止位置可変機能を付加したYθ型ねじ締めロボットです。
直交座標型ねじ締めロボット(横締め)
横締め専用の直交座標型ねじ締めロボットです。
Yθ型ねじ締めロボット(高トルク)
高トルク対応、直進+旋回型の当社オリジナルねじ締めロボットです。
垂直多関節型ねじ締めロボット(共同開発:株式会社安川電機)
垂直多関節ロボットを数多く制作する株式会社安川電機と共同開発。ねじ締めドライバとロボットを、一元管理可能です。ねじ供給装置も併せてパッケージ化しご提供します。
めねじ検査ロボット
ねじ締めロボットと同じ形態である「直交+旋回タイプ」の当社オリジナルめねじ検査ロボットです。
よくいただく質問にお答えします
KXドライバ・NXドライバを使用いただくなかで、よくいただく質問にお答えします。
アームドライバ<R>(T型・垂直)
当社製ドライバを標準搭載し、小型ワークに適した垂直型のバランスアーム付ドライバです。
各種製品、採用、一般・その他に関するご相談、ご依頼は、こちらよりお問い合わせください。