

位置補正カメラ搭載Yθ型ねじ締めロボットを新発売
2017/9/20
位置補正カメラ搭載Yθ型ねじ締めロボットを新発売
~ 締付位置の精度が出しづらいワークもカメラで補正、自動機導入の障壁をクリア ~
■はじめに
日東精工株式会社(本社・工場:京都府綾部市 代表取締役社長:材木正己)は、昭和40年に国産初の自動ねじ締め機を開発して以来、ねじ締めロボット、ねじ締めドライバ、ねじ供給機など締結に関する省力装置を手がけ、世界中の組立現場をサポートしてきました。当社の製品は、厳しい品質管理を要求される自動車関連を筆頭に、家電、OA機器、住宅設備、遊技機など業界を問わず幅広い分野で活躍しており、「ねじ締め機の日東精工」としてFA業界を牽引しています。
そのような中、自動ねじ締め機の更なる進化・要求を満たすべく、位置補正カメラの搭載をオプション機能としたYθ型ねじ締めロボット(ねじロボⓇ)を10月1日から受注開始することをここにご案内いたします。
当社は、工業用ファスナー(ねじ)のトップメーカでもあり、締結部品・締結装置の両面からファスニング・ソリューションによるねじ締結の最適化を提案し、モノづくりの高度化を支援してまいります。
■製品開発背景
製品の多種多様化が進むにつれ組付対象部品の形状が複雑になると正確な位置決め(固定)が困難となり、締付位置のズレが生じます。自動ねじ締めでは、ねじ呼び径の10%を超える位置ズレがある場合はその量に伴い締付ミスが増加します。ねじ締めロボットを使用する場合は、実際の締付位置をひとつひとつ記憶させるティーチング(教示)作業が必要であり、位置ズレによる斜め締付けやねじ浮き現象が発生すると長時間の再ティーチング作業を要し、生産効率が低下します。また、作業者による多品種少量生産ラインのねじ締め工程においては、自動化のためには再現精度の高い位置決め装置に入れ替える必要があり、導入コスト面から自動化が進まない状況にあります。
位置ズレの解消方法として、ねじ先端部を棒先形状にしたり、製品側で締付位置の面取りを施すことなどが挙げられますが、コスト面や品質管理上、根本的な解決に至らず、ユーザからは締付装置側での補正機能が求められていました。当社ではお客様の声を真摯に受け止め、当社独自のロボット形態であるYθ型ねじロボⓇに位置補正カメラを搭載し、締付品質の向上を実現しました。
今般の現地法人化により、グループの総合力を活かした総合ファスニング企業としての強みを活かしたモノづくりと事業領域の拡大ならびにサービス向上を目指し、当社グループ全体の売上増強を図ってまいります。
■製品特長
Yθ型ねじロボⓇ(直進+旋回)は、直行座標型ねじ締めロボットと比較して横幅が大幅にコンパクトであり、推力制御機能やACサーボねじ締めドライバの搭載により、高精度・高機能の締付作業と抜群の汎用性を実現しています。その機能に位置補正カメラを搭載することで締付対象ワークの位置ズレを補正し、最適なねじ締めを行うことが可能となり、締付品質を向上させます。また、コンパクトな横幅により既設ラインへの導入が容易にでき、ねじ締め工程の自動化を推進します。

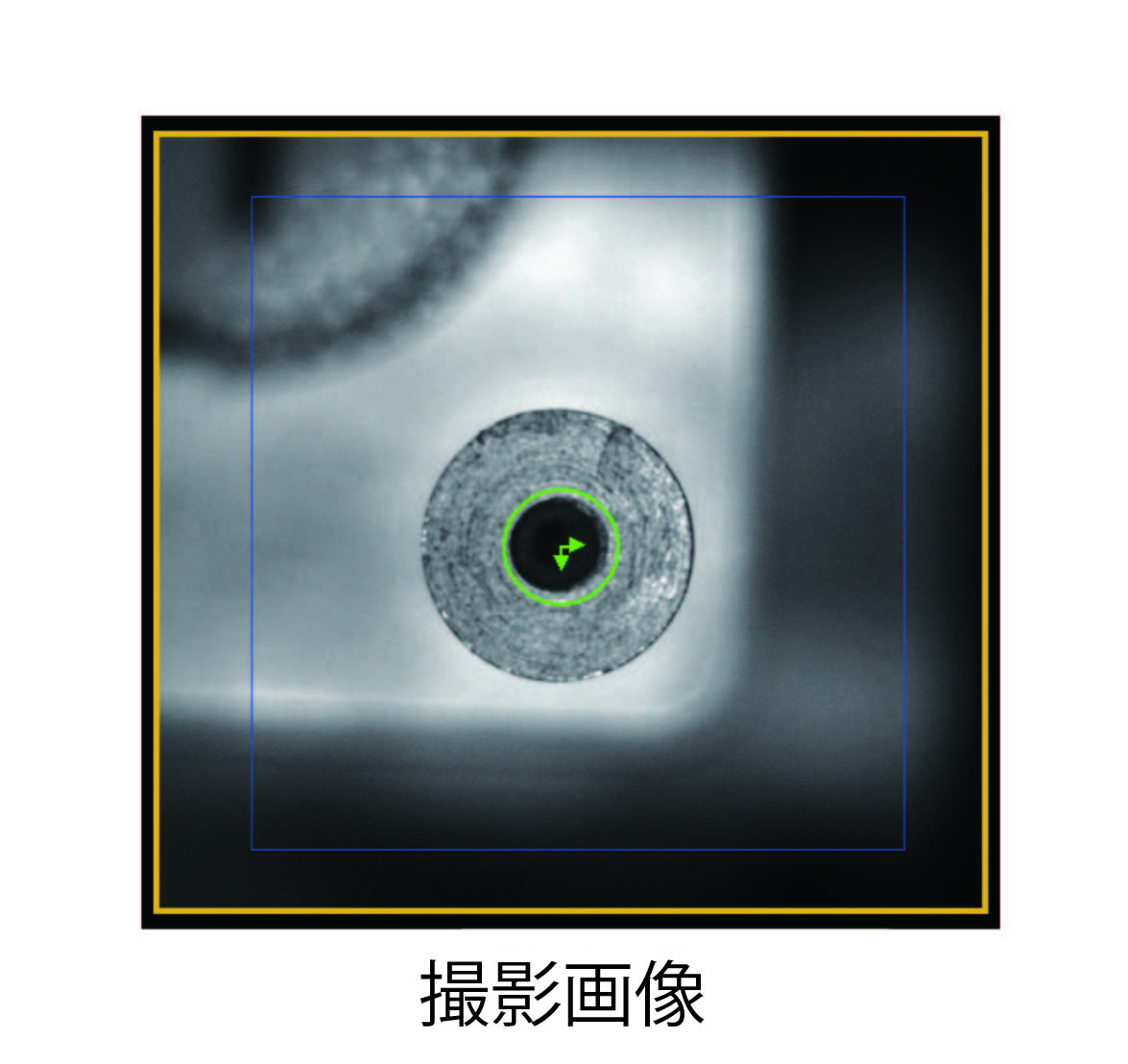
1)10mmの位置ズレを補正(ねじ呼び径3~5mm)
締付ティーチング位置に対して10mmの位置ズレを呼び径の10%以内に補正。ねじ締め
ミスの発生頻度が高い複合部品や板金など、締付位置精度が出しづらいワークや位置決め再現
精度が低い手作業ラインにも導入が可能です。
2)1~3ポイントの位置補正情報から全ポイントを位置補正
カメラ撮影後に補正した位置へ移動するため1ポイントあたりの締付時間が長くなりますが、
位置ズレの条件により補正回数が選択でき、当社YθねじロボⓇ独自のプログラムにより以降の
補正動作が不要。サイクルタイム延長を最小限にできます。
3)ティーチングデータの自動補正機能
締付対象ワークのロットによる位置ズレ修正や類似ワークのティーチング作業においては、
全ポイント補正機能により位置データにフィードバック。大幅な時間短縮が可能です。
■製品仕様
| タイプ | VR1A | VR1B | VR2A | VR2B | VR3A | VR3B |
| 解像度 | 35万画素 | 35万画素 |
35万画素 |
|||
|
カメラ設定距離 |
150~200mm(注2) |
200,300,500mm (レンズ交換) |
||||
| 視野範囲 | 約□30mm | 約□30mm | 約□30mm | |||
| 設定登録数 | 8 | 32 | 1000 | |||
| 照明 | 内臓 | リング照明 | ||||
モニタ |
専用モニタ[オプション] |
専用モニタ [オプション] 汎用モニタ使用可能 |
||||
カメラZ軸ストローク |
ー |
mm |
ー |
mm |
ー |
100, 200mm [250mm以上オプション] |
| 締付ストローク範囲 | 50~200mm (注2) | 50~400mm | ||||
| 位置補正精度 | ねじ呼び径の10%以内 (注4) | |||||
(注1) カメラ設定には別途パソコンが必要です。
(注2) カメラ設定距離・締付ストローク範囲は、ねじ呼び径により異なります。
(注3) Z軸ティーチングはティーチングペンダントで行いますが、修理交換時は初期設定のため
にパソコンが必要です。
(注4) 補正能力は撮影状況(ワーク表面状態・色種類・周囲照明環境)、ねじ仕様、ねじロボ
仕様(締付ストローク、動作範囲)により異なります。
(注5) 修理改造等によりカメラとねじ締め機の位置関係が変化した場合は、校正作業が必要です。
なお、ねじ締めロボット(コントローラ含む)、ねじ締めユニット部(搭載ドライバ含む)、ねじ
供給機の仕様は従来カタログに準じます。
■販売計画
希望販売価格(税抜):3,195千円(VR1A)から
ねじSR565Yθ-Zに位置補正カメラ搭載したセット価格。
タイプ別に価格は異なります。
締付対象ワークの撮影状況により照明やカメラの変更が必要となる場合は別途。
設置場所の環境により撮影状況が変化し再設定や周辺の対策が必要となります。
受注開始日 :2017年10月1日
販売目標 :5台/月
販売ターゲット :自動車部品、家電、OA機器、住宅設備、遊技機等




各種製品、採用、一般・その他に関するご相談、ご依頼は、
こちらよりお問い合わせください。
