

多機種ワークに対応するねじ締めロボット「SR580/RC7000」シリーズ新発売
2023/9/1
多品種対応と柔軟な設定・メンテナンス工数の削減で生産性を向上
~ 多機種ワークに対応するねじ締めロボット「SR580/RC7000」シリーズを新発売 ~
日東精工株式会社(代表取締役社長:荒賀誠、本社:京都府綾部市井倉町梅ヶ畑20番地、東証プライム、https://www.nittoseiko.co.jp/)は、この度、生産現場でのメンテナンス削減、操作機能の拡充を図ったねじ締めロボット「SR580/RC7000」シリーズの販売を2023年10月1日より開始することをお知らせいたします。
当社は、国産初の自動ねじ締め機を開発して以来、ねじ締めロボット、ねじ締めドライバをはじめとする様々な自動組立装置を手がけ、世界中の組立作業をサポートしてまいりました。
当社の自動組立装置は、IT製品、家電、住宅設備、遊技機器など幅広い分野で活躍しており、とりわけ厳しい品質や性能を要求される自動車関連の分野においても高い評価を得ております。
また、当社は工業用ファスナー(ねじ)のトップメーカであり、ねじ及びねじ締め装置の両面から締付けの最適化・課題解決に向けた当社ならではのご提案を行い、締結作業を軸とした高度なお客様のモノづくりを支援しております。
■開発背景
当社では2010年よりねじ締めロボット「SR565/RC5500」シリーズの販売を開始し長らくご好評をいただいておりましたが、この度、ユーザからのご要望を反映したねじ締めロボット「SR580/RC7000」を開発しました。
新たなねじ締めロボット「SR580/RC7000」は、最新のPLC、サーボモータ、サーボパックを搭載しており、従来機能を継承しつつ、各種機能の拡充を図った製品です。
■製品特長
SR580シリーズ Z軸サーボ仕様では、従来のSR565シリーズ Z軸サーボ仕様と同様、ねじ締め過程におけるねじ締め機の昇降速度、推力を細やかに設定することができ、昇降部のサーボ制御によって最適なねじの締付けを実現します。
例えば、上空からワーク手前までの工程では、高速・高推力で移動することで時間短縮を行い、ねじ込み開始から着座までのねじ込み工程では、中速・低推力でねじとワークに無理な負荷をかけずにねじ込みを遂行、そして、目標締付けトルクまで締め付ける本締め工程では、低速・高推力に切替えてドライバビットのカムアウトを防止します。また、ねじの締付け完了後は、低推力に切替えてワークにかかる負荷を軽減するなど、きめ細やかな締付け管理が行えます。
また、ねじ締めロボット本体の制御を司るRC7000は、従来のRC5500シリーズと同様、操作盤と各種設定の機能を併せ持つティーチングペンダントを採用しており、ロボット操作や各種設定値の入力などが1つの操作系で統一された、操作性の高い装置構成となっています。
ねじ締めロボット「SR580/RC7000」シリーズは、以上のような従来機の優れた性能を維持・継承しつつ、次のような新たな特長を備えたものとなっています。
1)多様な製品に対応する柔軟な設定で、生産性を最大化
設定登録可能な1機種当たりの締付けポイント数は、従来の40から100へと2.5倍に増加し、ねじパラメータの設定登録数も従来の5から20へと4倍に増加しました。これにより、締付け本数の多い製品への対応、ねじ締め条件(速度・推力など)の異なる品種への対応がより柔軟となりました。
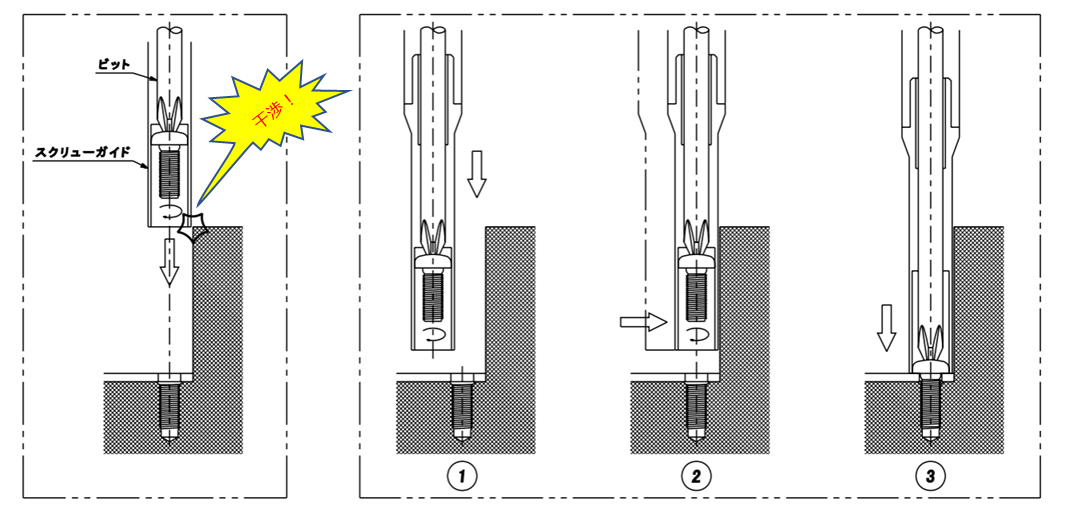
2)立ち上がりがある製品も確実に締付け可能に
お客様からご要望が多くあった2段モーション動作が追加となりました。製品に立ち上がりがあり、真上からアプローチしづらいねじ締め位置にも締付けが可能となりました。これにより、ワークの破損の可能性を低減します。
 |
|
| ①ねじ締め位置から少し離れた位置に下降し一旦停止 ②ねじ締め位置上空に移動 ③ねじ締め開始 |
|
3)CSV形式でデータ出力
発生した異常をカウントし履歴表示することで、どのような異常がどのくらい発生しているのかを特定できるようになりました。また、異常履歴をCSV形式でSDカードへ保存できるため、ユーザサイドでのデータ分析が可能になりました。
4)バッテリレス仕様エンコーダの採用でメンテナンス工数を削減
ロボット本体SR580に搭載のサーボモータには、バッテリレス仕様のエンコーダを採用。これにより、バッテリ交換と、それに必要な保守用バッテリの在庫確保が不要となり、メンテナンス性の向上と管理コストの低減を実現しました。また、バッテリの廃棄も不要になることから環境負荷低減にも寄与します。
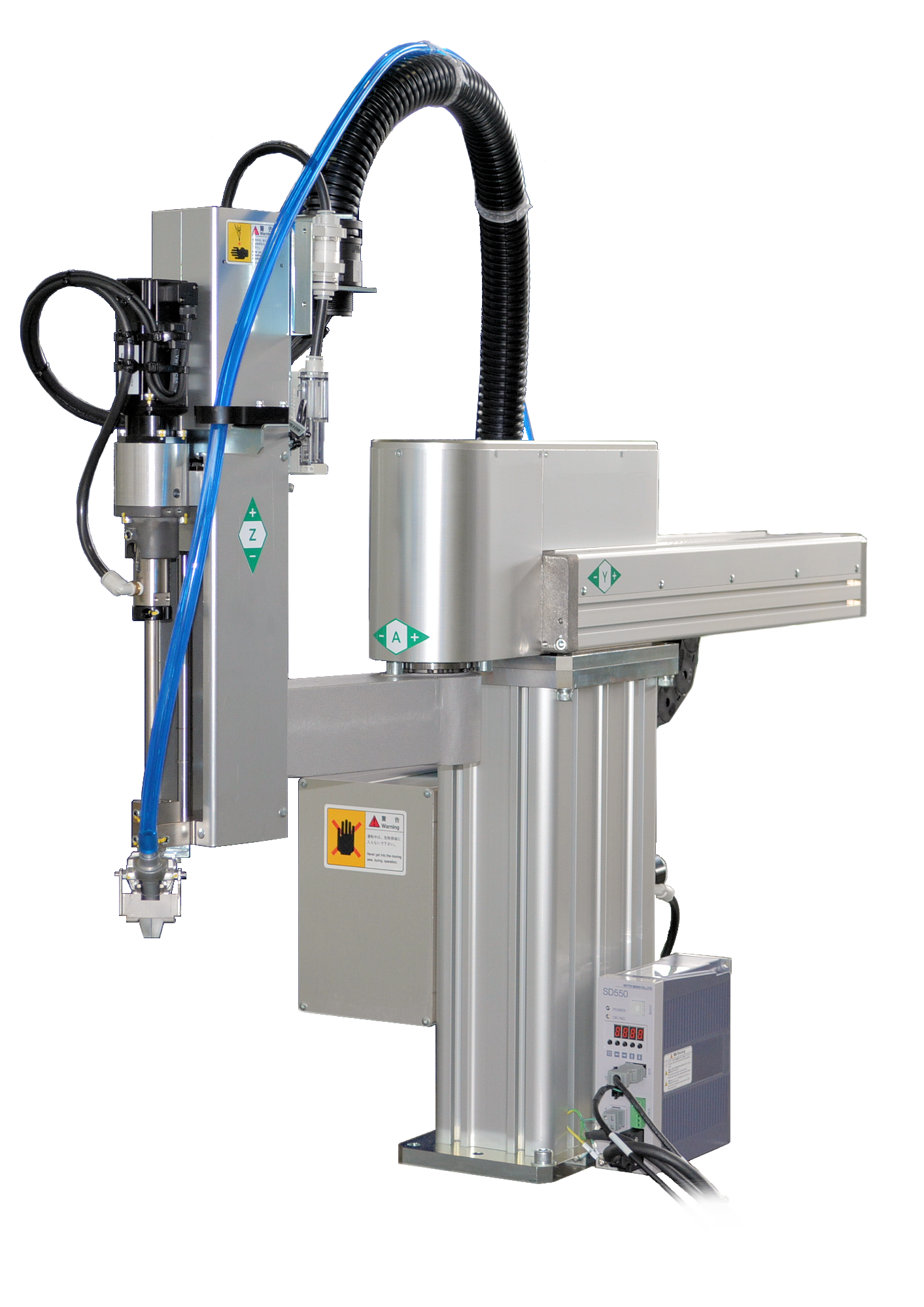
■製品構成図
 |
 |
| SR580Yθ-Z | RC7000コントローラ |
■製品仕様
| 〇ロボット本体仕様 | 【】はオプション |
| 型式 | SR580Yθ | SR580Yθ-Z | ||
| ねじ締めユニット | 制御軸数 | 同時2軸 | 同時3軸 | |
| 推力可変機能 | 無 | 有 | ||
|
適用ねじ (注1、注2) |
呼び径 |
小ねじ、タッピンねじ 2~5mm(M5トラスは除く) | ||
| 長さ | Max.18mm【25】 , Min.ねじ頭径×1.1mm | |||
| 設定トルク範囲 (注3) | 0.3~3.0N・m | |||
| ねじ供給方式 | エア圧送式 または 取出式 | |||
| ドライバ | KXドライバ , 【NXドライバ】 | |||
| 締付ストローク | 100 , 【150】mm | |||
| ねじ保持方式 | バキュームパイプ吸着式 | |||
| 不良検出機能 | トルク不良(ねじ空転),ねじ不足(供給装置にて) | |||
| ねじ浮き(近接センサ) | ねじ浮き(Z座標検出) | |||
| ロボット | 動作範囲 | Y軸 | 200 , 300 , 400 , 500mm | |
| 旋回半径R | 200 , 250 , 300mm | |||
| θ軸 | 180° | |||
| 最大移動速度 | Y軸 | 1,000mm/sec. | ||
| θ軸 | 360°/sec. | |||
| Z軸 | ー | 720mm/sec. | ||
| 位置繰り返し精度 | ±0.05mm | |||
| 使用空気圧 | 0.4~0.5MPa | |||
| 機械質量 (注4) | 約36Kg | 約37Kg | ||
| ねじ供給装置 | FF503H(当社製) | |||
| 〇ロボットコントローラ仕様 | 【】はオプション |
| 型式 | RC7000-S |
| 電源電圧 | 単相AC200~230V 50/60Hz |
| 制御軸数 | 最大6軸 |
| 位置決め方式 |
PTP、直線補間、円弧補間 (補間動作はYθ型ロボットでは非対応) |
| 位置検出方式 | 絶対値エンコーダ方式 (バッテリレス) |
| Ethernetポート |
内部に8ポートHUB搭載 (内3ポートは前面パネルに設置) |
| 記憶メモリ | SRAM(バッテリバックアップ:約5年) |
| 外部入力 (注5、注6) | 標準ユーザポート 16点 【I/O拡張可(注7)】 |
| 外部出力 (注5、注6) | 標準ユーザポート 16点 【I/O拡張可(注7)】 |
| フィールドネットワーク | [オプション] (注8) |
| 教示方式 |
MDI、リモートティーチング、ダイレクトティーチング |
| ポイント管理 |
作業領域:100ポイント×100機種 固定領域: 40ポイント |
| プログラムメモリ容量 | 15MB |
| ロボットプログラム | 専用モーション言語 |
| 外形寸法 W×H×D | 250×450×470mm |
| 質量 | 約20.0 kg |
|
ティーチング ペンダント |
ハンディ式タッチパネル (キースイッチ非常停止スイッチ、デッドマンスイッチ付) ペンダントを操作盤として使用することも可能 |
| パソコン対応ソフト | 【CPMC-MPE780D】 (注9) |
注1)ねじに合わせた専用構成になりますので、使用できるねじは1種類のみとなります。
注2)ねじサイズや頭部形状により、適用ねじ範囲は変わりますのでお問い合わせください。
注3)トルク帯により、ドライバ型式が異なります。
注4)ストローク、搭載ドライバにより変わりますのでお問い合わせください。
注5)装置構成により外部入出力I/Oをねじ締めシステム用として使用する場合があります。
注6)PNPにも対応しております。(ご注文時指定事項)
注7)NPNは最大増設I/O点数 入力64点、出力64点
PNPは最大増設I/O点数 入力32点、出力32点
注8)Ethernet, EtherNet/IP, EtherCAT, PROFINET, Modbus-TCP, CC-Link IE Field, FL-net
CC-Link, DeviceNet, PROFIBUS
注9)CPMC-MPE780Dは株式会社安川電機の製品です。
希望販売価格 :SR580Yθ 2,550千円
(税抜き) :SR580Yθ-Z 2,850千円
製品構成例 :①ねじ締めロボットSR580Yθ-Z
②ねじ締めロボットコントローラRC7000
③ねじ供給装置FF503H
④KXドライバ一式
⑤付属品(ケーブル)一式
⑥ティーチングペンダント
販売開始日 :2023年 10月 1日
目標販売台数 :SR580シリーズ月25台
主要販売先 :自動車部品メーカ、電機メーカ、自動機メーカ 等




各種製品、採用、一般・その他に関するご相談、ご依頼は、
こちらよりお問い合わせください。
