

課題から製品をさがす【ねじ締め機】
ナットランナ
〇安価に、締付力の切替が可能なナットランナを使いたい 
ACサーボモータ採用、16種の締付け設定が可能な
『KXドライバ』を紹介します。
〇安価に、精緻なトルク制御まで行いたい
ひずみセンサを内蔵した
『NXドライバ』を紹介します。
>製品ページへ
〇トレーサビリティを強化したい
異常検出をさらに強化したい
データ収集機能や、波形処理機能を搭載する、
NXドライバ『SD600Tシリーズ』を紹介します。
>製品ページへ
★KXドライバ・NXドライバについての
よくある質問&回答集は、こちらをご覧ください。
単軸・多軸ねじ締め機
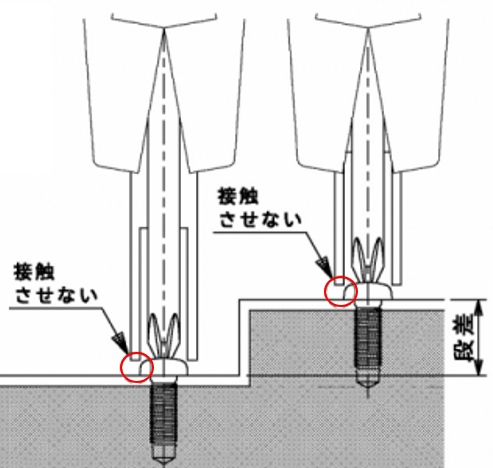
〇カムアウト、十字穴つぶれを防止したい
締付け箇所が狭い、段差や干渉物がある
〇推力をできる限り低く抑えたい
〇コントローラのIoT対応まで行いたい
〇搭載先ロボットをサイズダウンしたい
〇環境負荷を抑えたい
〇径の小さいねじの締付けを行いたい
M3以下のねじに対応可能な
軽量ねじ締め機『FM312V』を紹介します。
〇径の大きいボルトの締付けを行いたい

〇「ドリルねじ」の締付けを行いたい

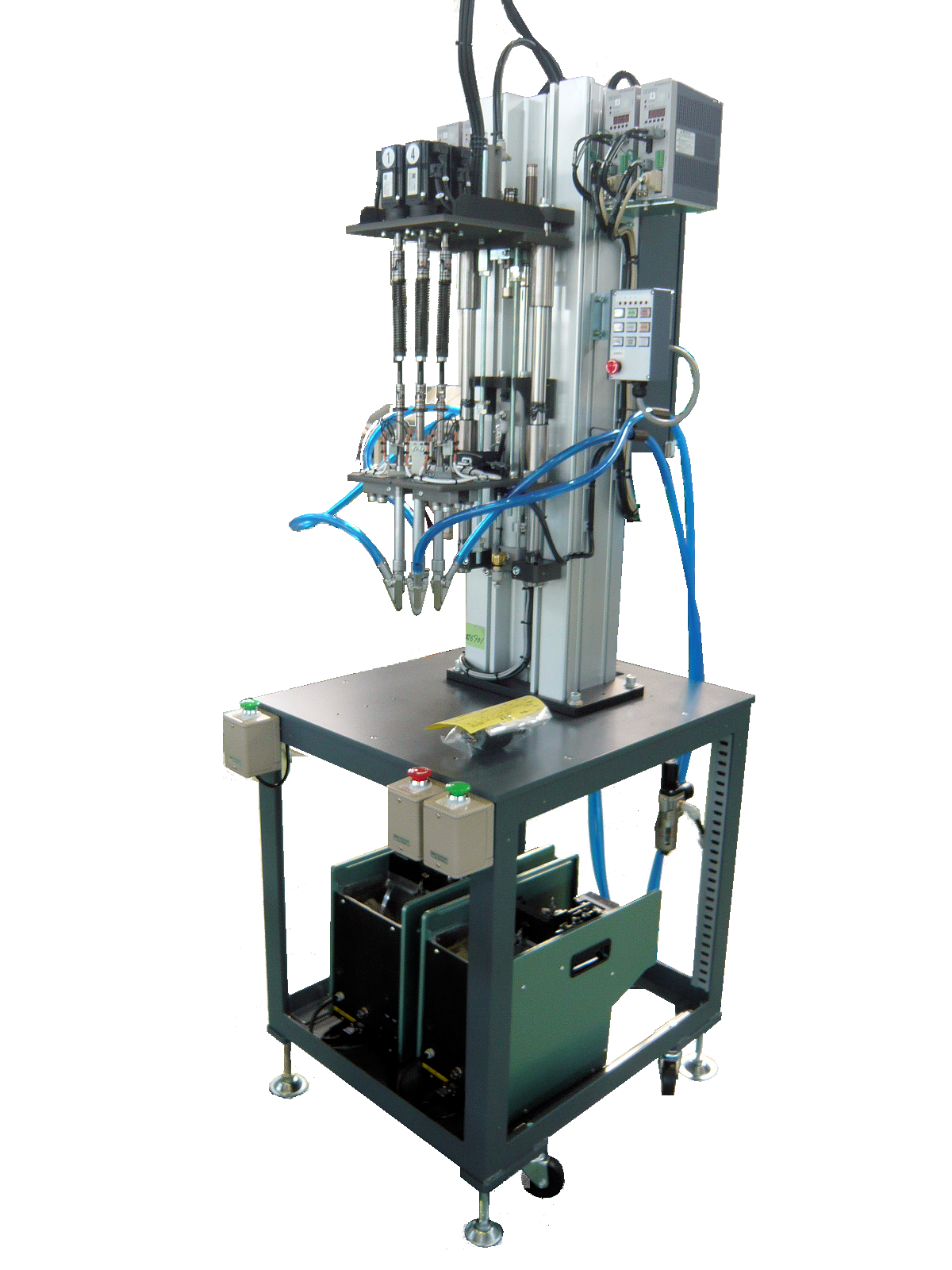
〇同時に複数個所のねじ締めを行いたい
〇ねじ浮き品の流出リスク・複雑なねじ浮き検査工程の
負担を軽減したい

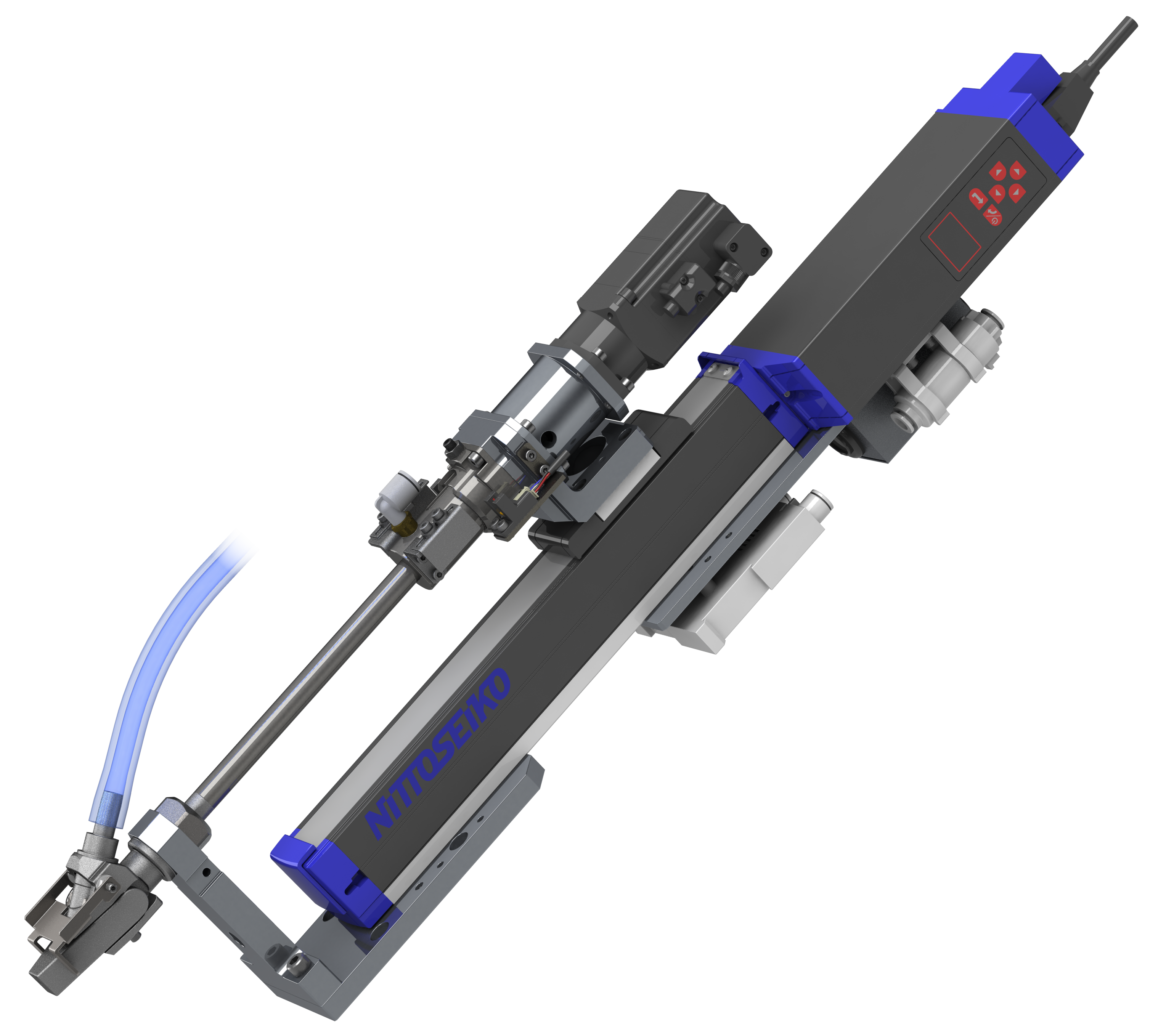
ねじ締めロボット・協働ロボット
〇ねじ締めをロボットで自動化したい


〇推力を調整したい
〇スクリューガイドがワークに接触するのを防ぎたい
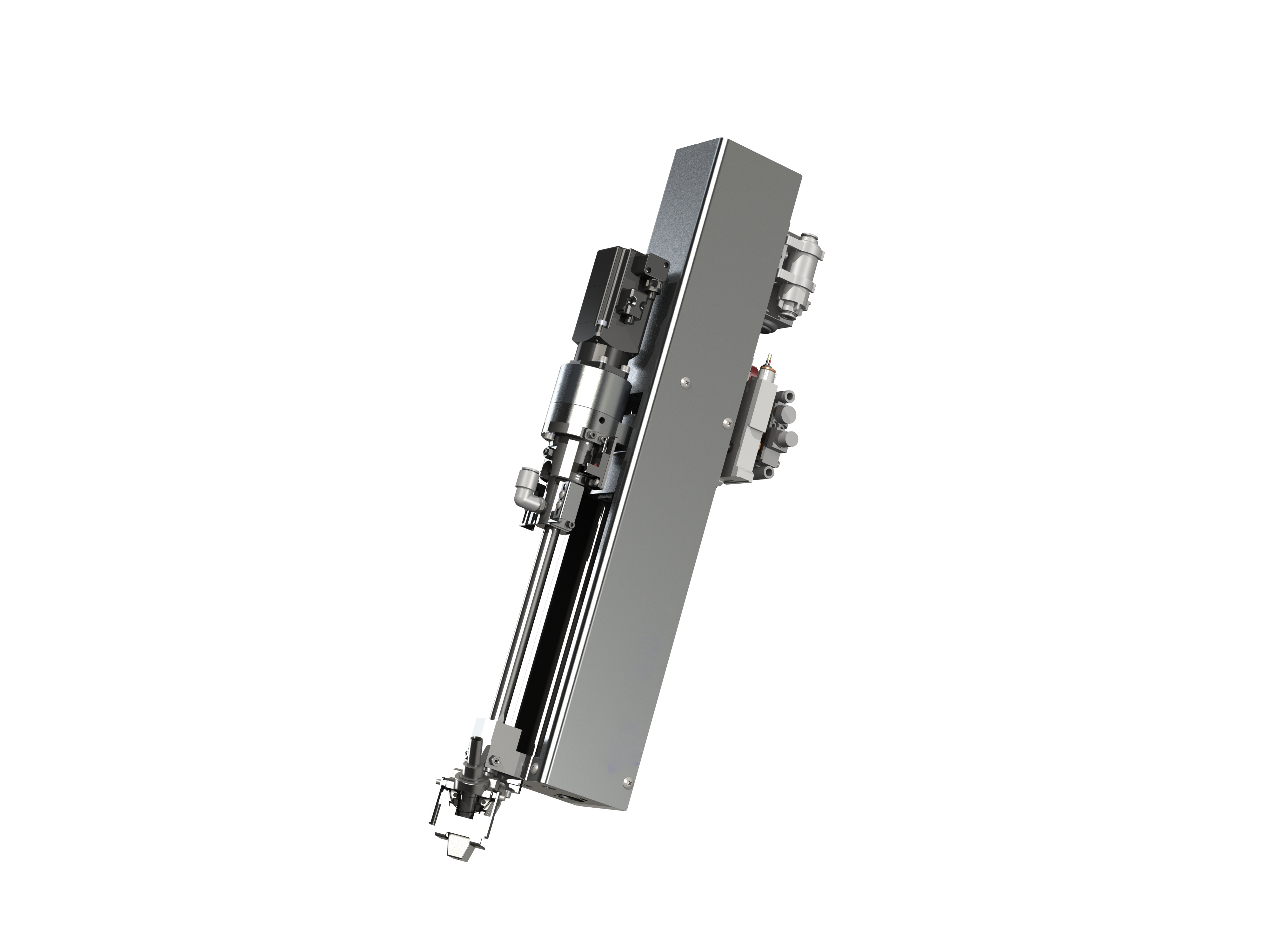
推力を極力弱くして締付けを行いたい
スクリューガイドを押し当てず、
ビットの推力だけで締付けが可能な
『SR580Yθ-ZZ』を紹介します。
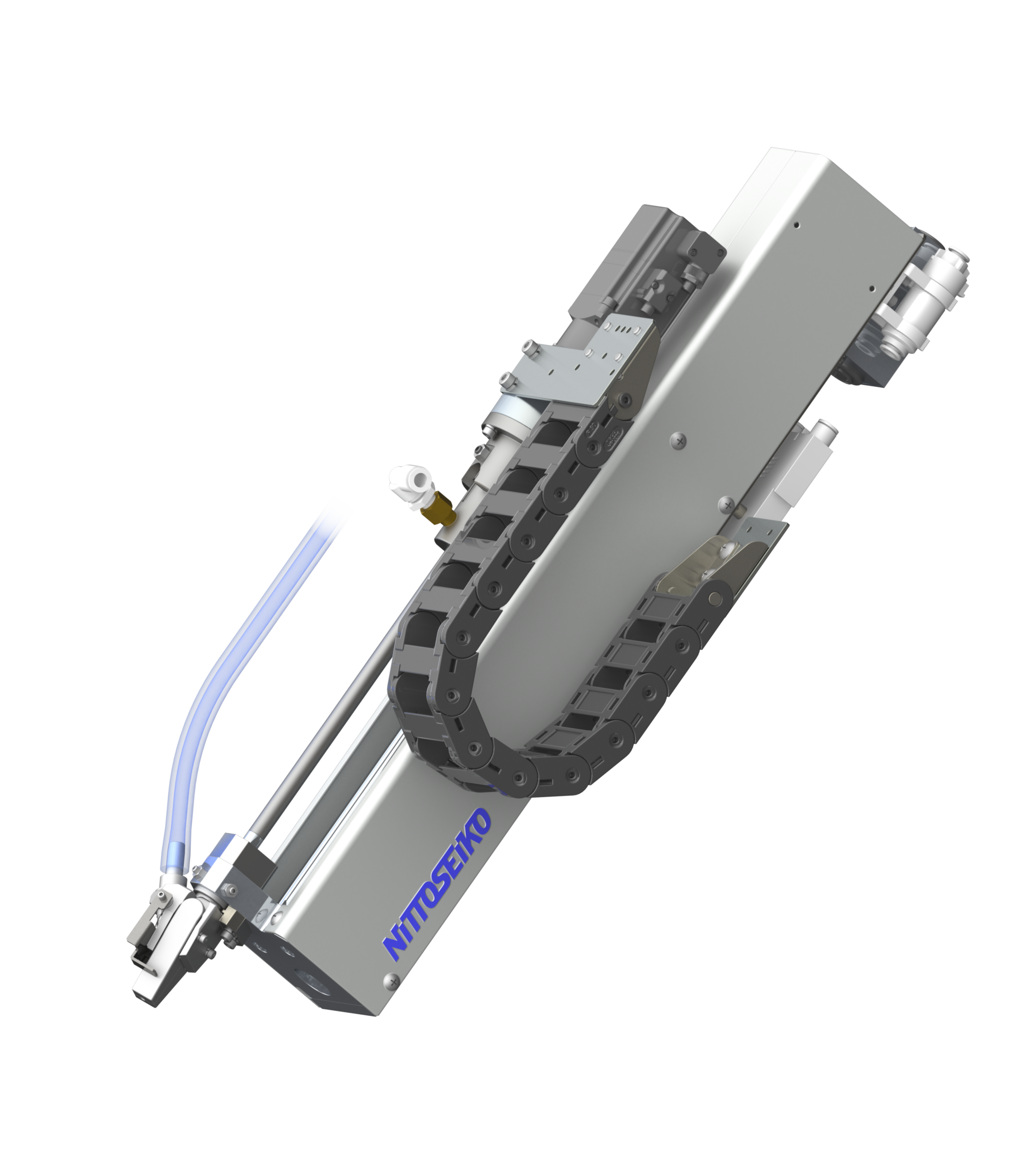
〇対象ワークのバラツキ、位置ずれを自動で補正したい

位置補正カメラを搭載したねじ締めロボット
『SR580Yθ-Z-VR』を紹介します。
〇卓上タイプのねじロボを使用したい

卓上ねじ締めロボット『SR395DT』を紹介します。
〇基板に特化したねじ締めを行いたい

『基板コネクタねじ締め機』を紹介します。
〇めねじを検査したい

ねじ締めロボットと同じ形態である「直交+旋回タイプ」の、
当社オリジナルの『めねじ検査ロボット』を紹介します。
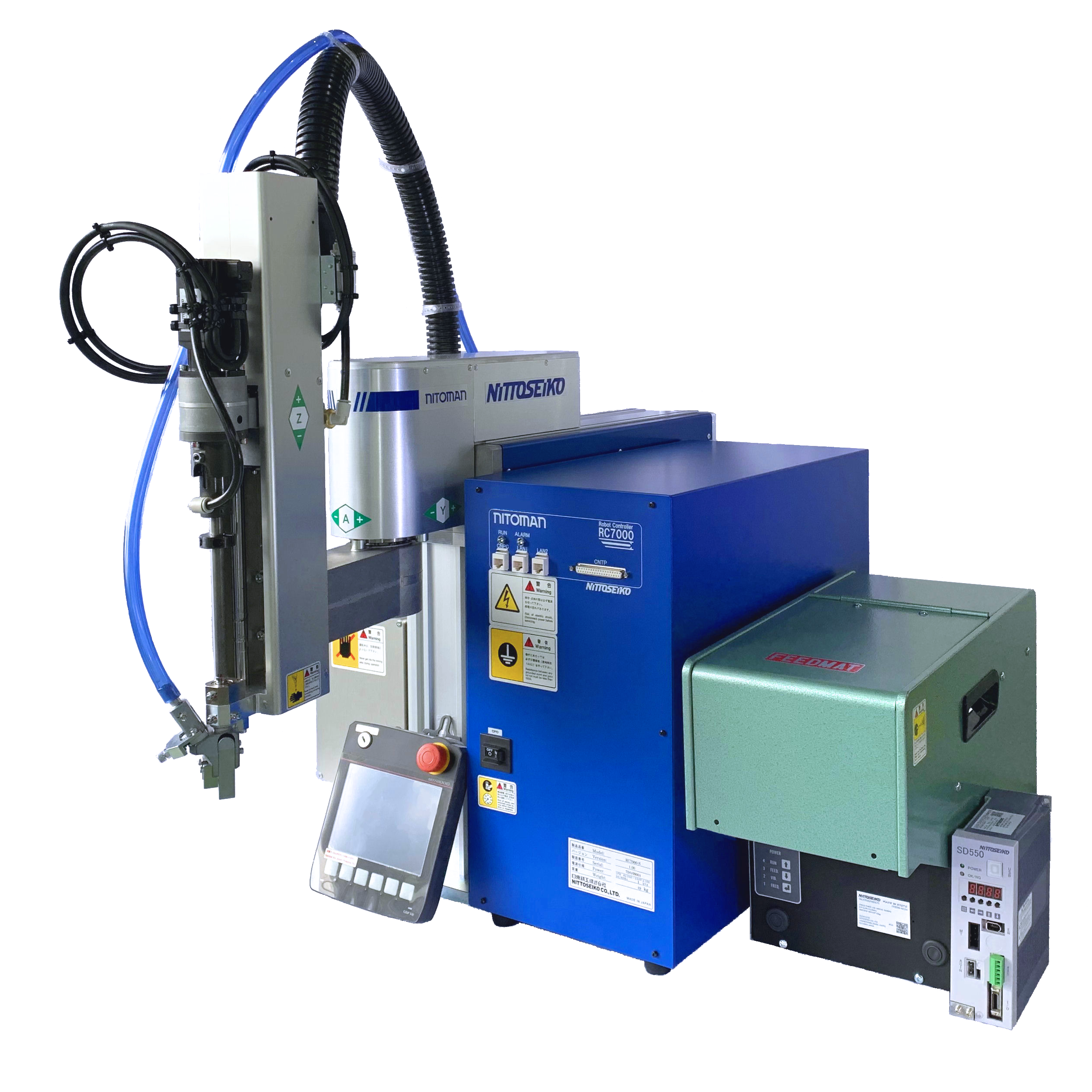
〇ねじ締めドライバとロボットを一元管理したい
垂直多関節ロボットを数多く制作する株式会社安川電機と共同開発。
ねじ締めドライバとロボットを一元管理可能な
『垂直多関節型ねじ締めロボット』を紹介します。
 |
|
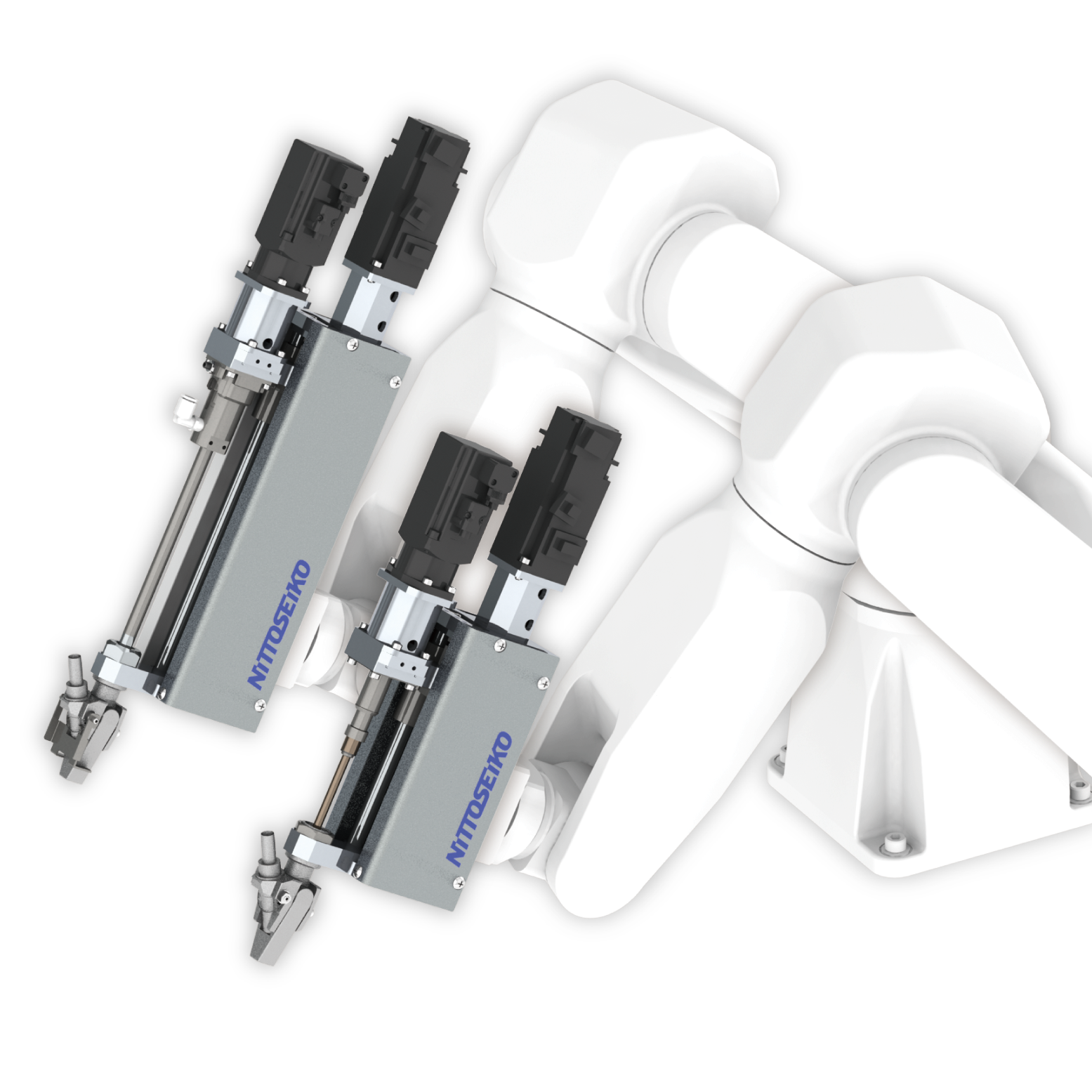
〇「協働ロボット」を活用してねじ締めを行いたい
各社協働ロボットに搭載可能な、ねじ締めユニットを紹介します。
.jpg) |
 |
 |
 |
|
| 『PD400UR』 ロボット:ユニバーサルロボット |
『PD400FA』 ロボット:ファナック |
『PD400YE』 ロボット:安川電機 |
『PD400TM』 ロボット:テックマン |
コンタミ対策ユニット
〇コンタミ対策をしながら、タイムロス無く締結したい
圧送式ねじ締め機に取り付けることで、
「コンタミ対策」と「タイムロスのないねじ供給」を両立した
『コンタミ対策ユニット』を紹介します。
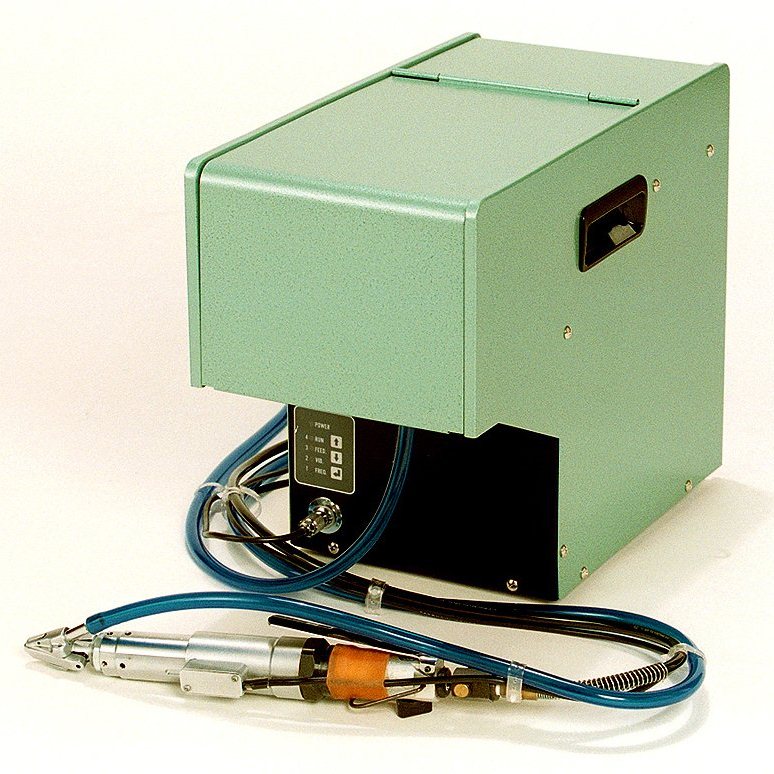
フィーダ(ねじ供給機)
〇ねじをはじめとする、種々の部品を自動供給したい
ねじはもちろん、ナットや鋼球などの部品も供給可能な
供給機を紹介します。
 |
 |
|
| 『FF503H』 M2~5のねじ・部品 |
『FF801H』 M8までの大きめのねじ・部品 |
〇コンパクトなフィーダにてねじ供給したい

M1.2~3のねじに対応可能なドラム式のねじ供給機
『FF311DR』を紹介します。
〇精密ねじを供給したい
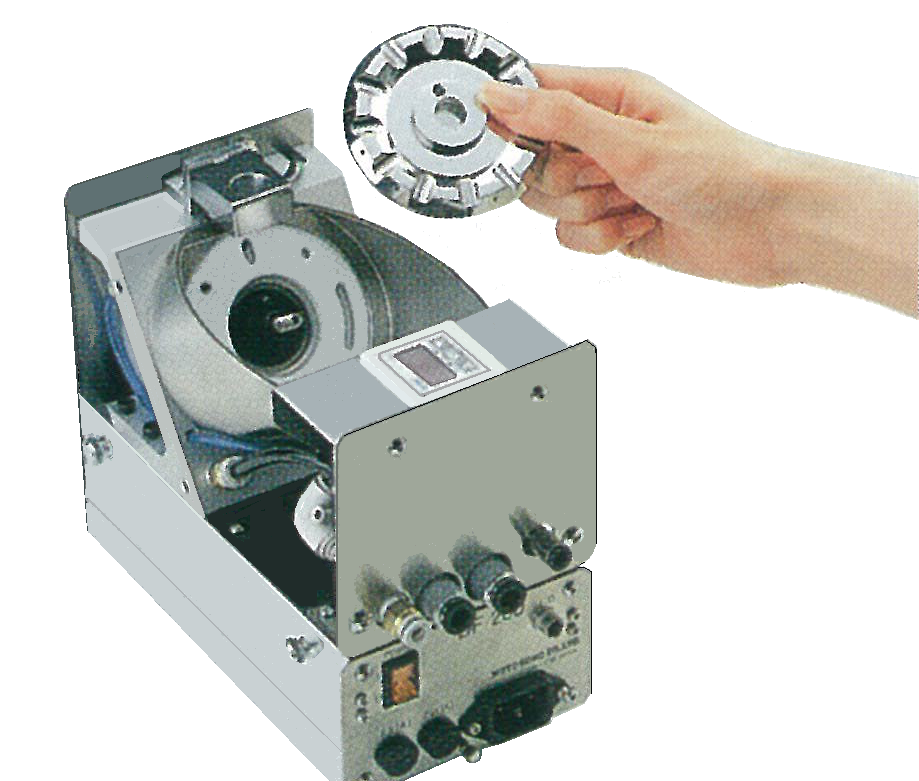
M0.6~2のねじに対応可能なディスク式フィーダ
『DF200』を紹介します。
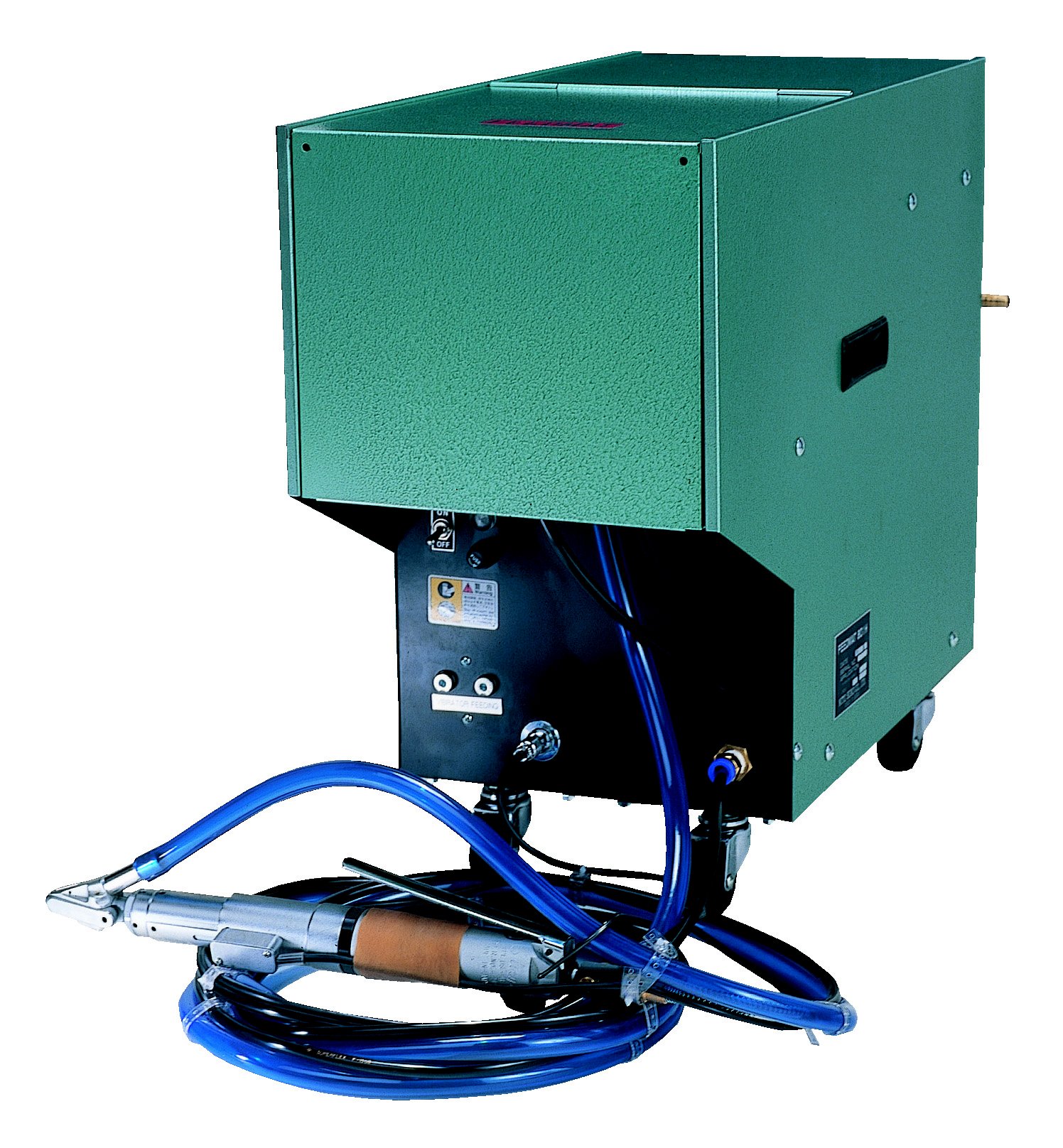
ハンディ用ねじ締め機
〇手作業でかかるねじ締め時間を短縮したい
(ねじを自動供給したい)
ねじを取り付ける手間が省ける、圧送式ハンディねじ締め機をご紹介します。
 |
 |
|
| 『FM503H』 M2~5用 |
『FM801H』 M3~8用 |
〇作業者にかかる負荷を低減したい
締め忘れを防止したい
手にかかる反力を低減する、各種アームドライバを紹介します。
 |
 |
 |
 |
|
| 『アームドライバ(T型)』 | 『アームドライバ(V型)』 | 『AD100TE・AD110TE』 | 『AD100VE・AD500VE』 | |
| スタンダードタイプ | 締付位置・本数をチェック可能 | |||
リベット・ハトメかしめ機
〇リベットをかしめたい 
リベットセッタ『RSシリーズ』を紹介します。
>製品ページへ
〇ハトメをかしめたい

アイレッタ『ES603』を紹介します。
 |




各種製品、採用、一般・その他に関するご相談、ご依頼は、
こちらよりお問い合わせください。
